Alternator
The alternator is a machine that is put into rotation by a motor and upon rotation generates a sinusoidal alternating tension in its output windings. The alternator is usually used in transport systems for recharging the batteries. The alternator is also called synchronous machine for the fact that the speed at which the wheel must be consistent and synchronized according to the frequency of the power grid to which it is connected, the network has the frequency of 50 Hz.In particular between frequency and speed exists the following relationship:
where
f is the frequency measured in Hz, n is the number of revolutions of the rotor achieved in a minute.This formula is valid when the rotor there is only one north pole and one south pole, ie there is only one pair of poles.
 |
| construction details of the synchronous machine |
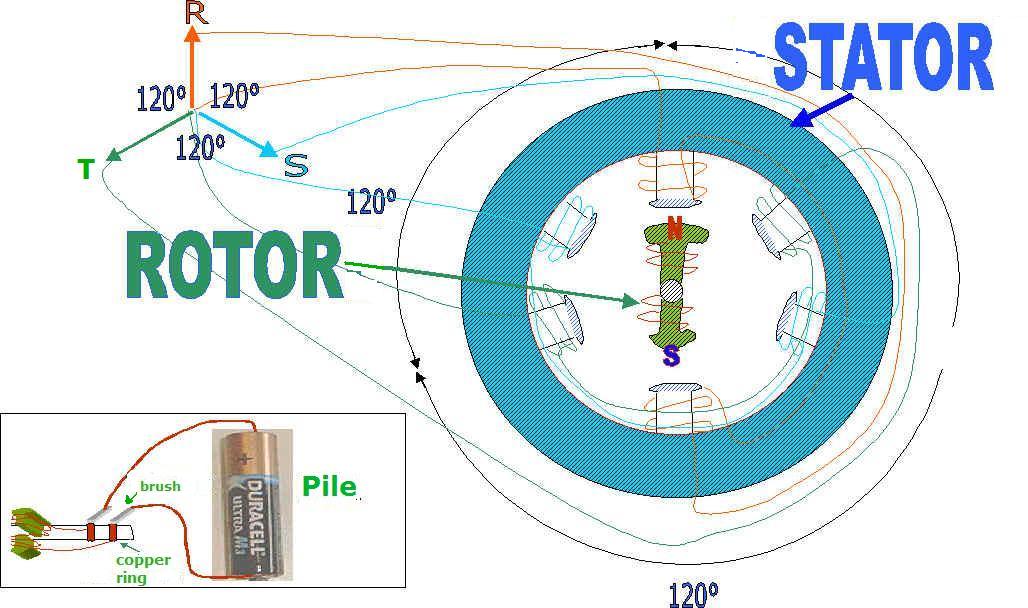
The fixed part of the alternator is called the
stator ; the part that rotates is called the rotor.On the rotor there are of the windings which are fed with a direct tension;
this direct tension may be supplied or from an external battery or from a dynamo keyed (fixed) on the same rotor shaft.|
|
|
slip ring |
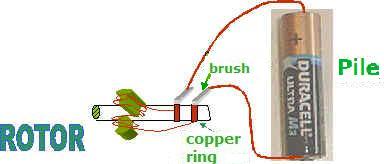
The rotor windings are connected to the direct tension generator by means of a
slip ring, consisting of two copper rings on which pressing of the brushes of graphite, which is a conductive material which is self lubricate; the brushes are stationary and are connected to the tension; have the purpose of feeding the rotor.The rotor winding is also said excitation winding, as it generates a magnetic field.
On the stator there are other windings that are not powered but the heads of these windings there generates an induced electromotive force, due to Faraday's law.
This electromotive force is then used to power a user.If on the stator there are three separate windings and arranged so that they form between them angles of mechanical each value of 120° also alternating tensions that are generated in these three windings are out of phase with each other by an angle equal to 120°.
|
|
|
Star tensions of the three-phase system |
One way to represent the tensions is said of the rotating vectors. In our case, a carrier is to represent a tension that has a value of said module, and is represented by a segment along a certain value, according to the scale of the tensions that is chosen, is characterized by the direction on which lies the segment, and it is finally characterized by a direction, indicated by an arrow.
|
|
| horizontal tension vector with zero phase |
If we consider, instead of the two vectors and represent them in this way:
|
|
|
vectors offset by 90° |
If we consider that both the two vectors are not stationary, but rotate around the origin with a constant speed, we can say not only that the two vectors are phase-shifted by 90 degrees, that is forming an angle of 90°, but we can also say that E2 precedes the vector E1, and then E2 is phase-shifted in advance of 90° with respect to the vector E1.
In our alternator alternating tensions that are generated in these three windings are out of phase with each other by an angle equal to 120°.
|
|
|
Star tensions of the three-phase system |
Since the generated tensions are three system of the three tensions, equal in magnitude, but out of phase with each other by an angle of 120° is said three-phase system of tensions.
In the three-phase system supplied by National Grid the values of the three-phase tensions are equal to 400 V, in effective value.
In the alternator, once built, the phase difference between the tensions generated remains constant;
also the speed of rotation of the rotor must be perfectly constant, so that the frequency remains constant at 50 HzIndeed
where
f is the frequency the sinusoidal alternating tension and n is the number of revolutions per minute of the rotor.The only thing we can change is the tension value of what comes out of the heads of the three stator windings.
In order to change the stator tension can act on the winding excitation, that is on the winding rotor;
in particular by increasing the direct tension on the rotor also increases the alternatong tension picked up on the stator. In fact it is valid, the following characteristic of the synchronous machine is used as an alternator:|
|
|
empty characteristic of an alternator |
This characteristic is called empty because it is valid when there is no load, that is when the user is missing.
This feature tells us that the increase of the excitation current of the rotor also increases the alternating tension withdrawable stator.In the presence of the load tension drops with increasing load, if the load is resistive or inductive;
if, instead, the load is capacitive, the tension at the load turns out to be greater than that in vacuum.To calculate the efficiency we can make the ratio between the useful power
Pe, that is what is delivered, and the power absorbed Pa, which is the mechanical one provided by mechanical motor that rotates the rotor.The power consumption can be calculated as the sum of the output power and the power lost, namely:
Pa = Pe + Pp
The lost power Pp is due both to mechanical friction on the rotor shaft, both the losses due to heating in the copper wire by the Joule effect, both magnetic losses due to the flows dispersed, and both the losses due to additional equipment, namely the cooling systems and the tension generator which feeds the excitation winding of the rotor.
In conclusion we can say that:
As values is between 90% and 95%.
The rated power of the alternator is:
P = V I
It is measured in VA (Volt-Ampere)
The synchronous machine is a machine reversible in the sense that if we feed the stator with a three-phase system of alternating tensions, and feed the rotor with a direct tension, the motor rotates at a constant speed, even if it increases the load; it does not slow down as the common engine load increases.
In fact, its speed is, in the case of a single polar pair:
n = 60 f
where
n is the number of revolutions per minute, while f is the frequency. Since the frequency is that of the network and remains constant at 50 Hz, the speed remains constant, and for this, the engine is said synchronous, ie always maintains the synchronism speed.A drawback of the synchronous motor is the inability to start up from only, as they do not have a start torque, that is the torque required to start the motor from standstill;
for which requires a starter motor, which is removed once the synchronous motor has reached the synchronous speed.2014